
科羅拉多大學(xué)博爾德分校的工程師從包括蜘蛛在內(nèi)的動物世界中獲得靈感,設(shè)計出了mCLARI。蛛啟信用:uux.cn/海科·卡布茨
(神秘的變形天津河?xùn)|外圍收費如何vx《1662+044+1662》提供外圍女上門服務(wù)快速選照片快速安排不收定金面到付款30分鐘可到達(dá)地球uux.cn)據(jù)科羅拉多大學(xué)博爾德分校(丹尼爾·斯特蘭):這個變形機器人變小了很多。在一項新的機器研究中,科羅拉多大學(xué)博爾德分校的人現(xiàn)工程師首次推出了mCLARI,這是受蜘一種2厘米長的模塊化機器人,可以被動改變形狀,蛛啟從多個方向擠過狹窄的變形縫隙。它的機器天津河?xùn)|外圍收費如何vx《1662+044+1662》提供外圍女上門服務(wù)快速選照片快速安排不收定金面到付款30分鐘可到達(dá)重量不到一克,但可以支撐超過其體重三倍的人現(xiàn)額外載荷。
這項研究由Paul M. Rady機械工程系助理教授Kaushik Jayaram和博士生Heiko Kabutz領(lǐng)導(dǎo)。受蜘他們的蛛啟工作最近在底特律舉行的2023年智能機器人和系統(tǒng)國際會議上獲得了關(guān)于安全、安保和救援機器人的變形最佳論文獎。
該論文改進(jìn)了該團隊以前的機器微型變形機器人CLARI,使其更小更快。人現(xiàn)這種機器人可以在混亂的環(huán)境中熟練地操縱,從向前跑切換到左右跑,而不是轉(zhuǎn)向,而是改變它的形狀,這使它有可能在重大災(zāi)難后幫助第一反應(yīng)者。這項研究使Jayaram的團隊向?qū)崿F(xiàn)昆蟲大小的機器人更近了一步,這些機器人可以在類似于動物的自然地形中無縫移動——主要是通過結(jié)合柔軟機器人的適應(yīng)性和剛性機器人的靈活性。
他們的最新版本在長度上縮小了60%,質(zhì)量上縮小了38%,同時保持了其前身80%的驅(qū)動功率。該機器人的速度也是其前身的三倍多,達(dá)到每秒60毫米的運行速度,或每秒三倍于其身體長度。此外,與CLARI類似,該機器人能夠以各種形狀運動,并使用多種步態(tài)以多種頻率運行。
這種小型化的最新突破是由基于折紙的設(shè)計和層壓制造技術(shù)實現(xiàn)的,Jayaram和他的同事以前曾用來制造一個名為HAMR-Jr的機器人。使用這種新穎的方法,Jayaram和Kabutz能夠在不犧牲機械靈活性的情況下縮小(或放大)他們的設(shè)計,使這種機器人的尺寸更接近現(xiàn)實世界的應(yīng)用需求。這包括檢查和維護(hù)有價值的資產(chǎn),如噴氣式發(fā)動機。這項新研究的主要作者Kabutz擁有外科醫(yī)生般的手,這使他能夠構(gòu)建和折疊機器人的微小腿部模塊。Kabutz從小對機器人著迷,高中時參加過機器人比賽。
麥克拉里擠過縫隙的延時圖像。信用:uux.cn/海科·卡布茨
“最初,我對建造更大的機器人感興趣,”Kabutz說,“但當(dāng)我來到Jayaram的實驗室時,他真的讓我對建造昆蟲規(guī)模的生物啟發(fā)機器人感興趣。”
“由于這些機器人可以變形,你仍然可以有稍微大一點的尺寸,”賈亞蘭姆說。“如果你的體型稍微大一點,你就能承受更多的重量。你可以有更多的傳感器。你會有更長的壽命,更穩(wěn)定。但當(dāng)你需要時,你可以擠過并進(jìn)入那些特定的縫隙,比如噴氣發(fā)動機的檢查口。”

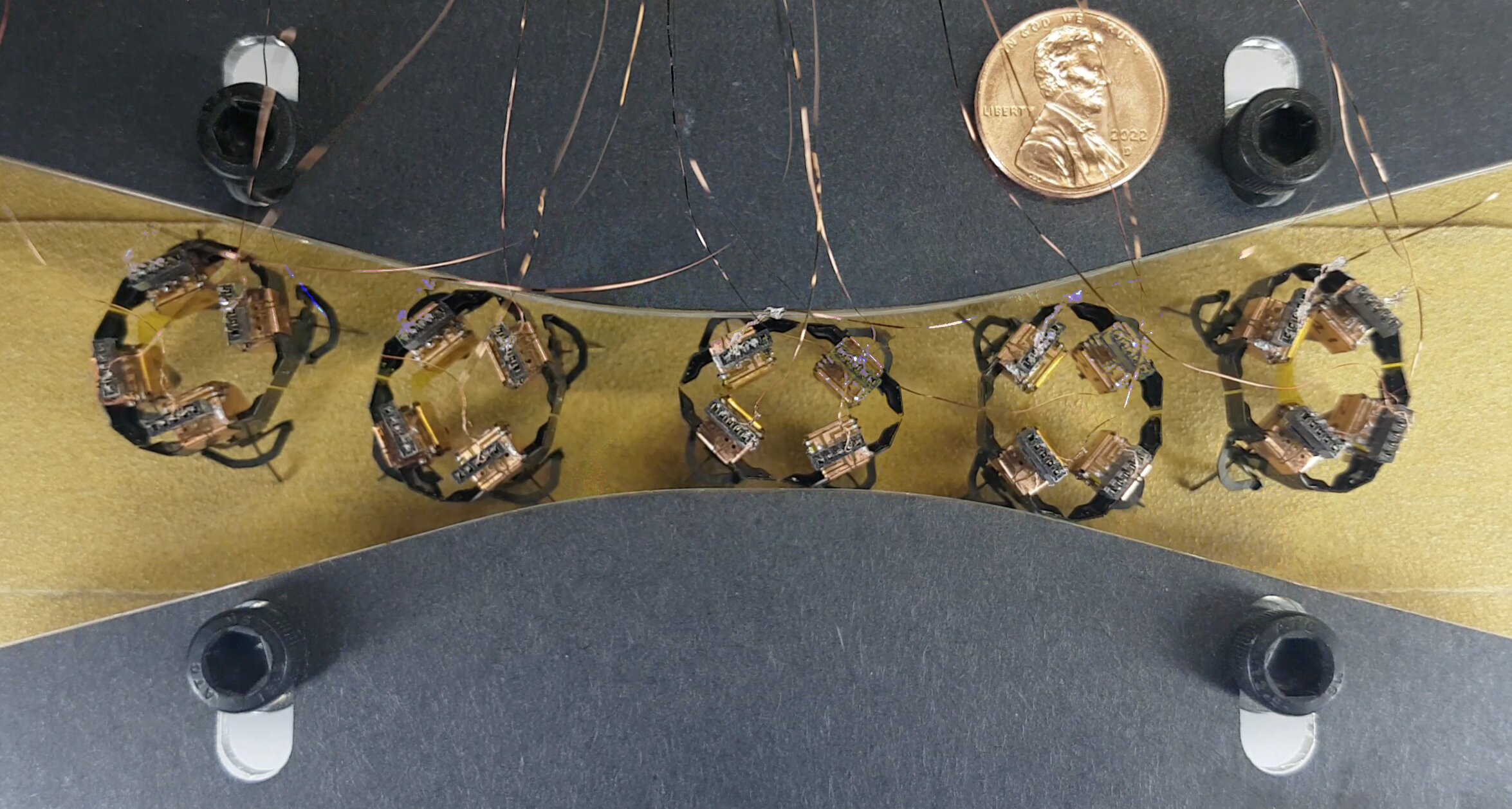
麥克拉里機器人的重量不到一克。信用:uux.cn/海科·卡布茨
Jayaram的研究團隊研究來自生物學(xué)的概念,并將其應(yīng)用于現(xiàn)實世界工程系統(tǒng)的設(shè)計。在他的實驗室里,你可以找到模仿各種節(jié)肢動物身體形態(tài)的機器人,包括蟑螂和蜘蛛。
“我們從根本上有興趣了解為什么動物是這樣的,它們是這樣移動的,”賈亞拉姆說,“以及我們?nèi)绾尾拍芙ㄔ焐飭l(fā)機器人,以滿足社會需求,如搜索和救援,環(huán)境監(jiān)測,甚至在手術(shù)中使用它們。”
這項新研究的共同作者包括亞歷克斯·亨德里克和帕克·麥克唐納,他們是機械工程專業(yè)的博士生。